

서 론
재료 및 방법
시험포장조성
드론 영상 촬영
드론 RGB 영상처리를 통한 높이 예측
높이 기준점을 이용한 다점 보정 모델식 개발
높이 예측의 검증
RGB 영상기반 높이 지도를 이용한 케나프 생육특성 분석
결과 및 고찰
다점 보정 모델
케나프 높이 지도의 육종 적용
적 요
서 론
케나프(Hibiscus cannabinus L.)는 인도와 아프리카 지역 토종인 아욱과(Malvaceae)에 속하는 무궁화속(genus Hibiscus)의 난지형 일년생 식물이다(Kaldor et al., 1990; Kamal, 2014). 케나프는 풍부한 복사량과 강우량을 보이는 열대기후에서 잘 자라지만 온대성 기후에서도 생산이 가능하고 다양한 토질에도 강한 생육을 나타내며 건조에 강한 특성을 보인다. 특히, 하루 사이에 10 cm 이상 자랄 정도로 생육 속도가 빠른 특징을 가진다(Alexopoulou et al., 2013). 케나프는 오래 전부터 밧줄 및 끈, 포대 등으로 사용되어 왔고 화학 공정이 발달한 현대에 이르러 펄프, 바이오매스, 플라스틱 용품 등으로 사용되며 인도, 중국, 동남아시아, 미국 등 20 여개국에서 국제적으로 폭넓게 재배되고 있다(Afzal et al., 2020). 또한 단위면적당 이산화탄소 흡수량이 높아 최근엔 농업 분야에서 지구온난화를 극복하는 친환경 작물로 각광받고 있고 잎에 비타민 C, 철분 등과 항산화 물질이 함유되어 있어 기능성 약품, 식품 및 화장품 소재로도 이용이 가능하다(Nishino et al., 2003; Hassan et al., 2017).
국내에서는 섬유 작물로 활용성을 기대하여 1960년 대에 가마니 포대 생산을 목적으로 육종 실험이 진행되었으나 화학소재의 포대 생산 기술 확보로 연구가 중단되었다(Park & Kim, 1965). 하지만, 최근 각종 소재 분야에서 친환경적이며, 가격이 저렴하고, 생분해가 가능한 천연 섬유의 적용이 대두되고 있어 셀룰로오스계 섬유질이 풍부한 케나프는 소재 공정 과정에서 천연 보강소재로서 활발히 연구되어지고 있다(Cho et al., 2002; Anuar & Zuraida, 2011). 또한 국내 사료작물의 대부분을 차지하는 옥수수, 수수, 수단그라스 뿐만 아니라 대체 사료 자원을 확보하기 위한 지속적인 연구가 요구되고 있는 실정에서, 잎, 줄기 등의 부위에 조단백질 함량이 높은 케나프는 가축 사료로서 적합하여 케나프의 사료 작물로서의 국내 활용 가치가 높아지고 있다(Oh et al., 2018). 이와 같이 국내에서 케나프의 섬유와 가축 사료로서 활용 요구가 높아, 국내 환경에서 케나프의 안정적 생산을 담보하는 품종을 생산하고자 케나프 육종 연구가 재개되어 활발히 진행되어 왔다(Kang et al., 2016; Ryu et al., 2017; Webber III, 1993b).
케나프의 섬유와 사료작물로서 가치를 높이기 위한 품종 개량은 공통적으로 작물 높이를 정량적으로 측정함으로 달성할 수 있다(Webber III et al., 2002; Kim et al., 2021). 케나프를 섬유로서 이용할 목적으로 재배한다면 줄기의 건체중을 최대화하는 품종을 선발해야 하며 작물 높이는 줄기의 건체중과 상관성이 높아 주요 표현형 인자로 활용할 수 있다(Han et al., 2021). 케나프를 가축 사료로 활용하기 위해선 조단백질의 함유량이 가장 높도록 품종을 개량하는 것이 요구되며 조단백질은 케나프의 잎에 가장 많이 분포(14-34%)하고 있어 잎의 양을 최대화하는 품종을 선발해야 한다(Oh et al., 2018; Webber III, 1993a; Webber III et al., 2002). 잎의 양은 성장 과정에서 분지되어 나타나는 마디 수에 의존적이며 마디 수는 작물 높이와 상관성이 높아 작물 높이를 사료 작물로 개량하기 위한 표현형 인자로 활용하기에 적합하다(Kim et al., 2021). 하지만, 케나프는 3~5 m까지 자라는 작물로 케나프의 높이를 측정하려면 사다리를 이용해야 할 정도의 위험 환경에 노출되어 작물 높이에 대한 정량적으로 계측하기 위해선 높은 노동력과 비용, 시간이 소요된다(Abo-Kaied et al., 2008).
다양한 센서를 이용하여 습득한 영상을 통해 필요한 데이터를 얻을 수 있는 원격탐사 기법은 다양한 환경과 작물을 대상으로 표현형 분석에 획기적인 발전을 가져오고 있다. 원격탐사 기법은 적은 노동력과 비용, 시간으로 작물 표현형 데이터를 취득할 수 있으며 비파괴적으로 작물 재배 노지 전체에 걸쳐 영상을 획득할 수 있기 때문에 대량의 작물 표현형 데이터를 취득할 수 있다(Araus et al., 2014; Wójtowicz et al., 2016; Shanmugapriya et al., 2019). 특히, 위치 정보 기반의 무인 비행체(unmanned aerial vehicle, UAV)인 드론(drone)을 이용한 원격탐사 기법은 시․공간적으로 높은 해상도의 영상을 제공하여 시간적, 공간적 특이적인 작물 데이터를 취득 가능하게 하여 기존의 표현형 분석에서 제기된 문제들을 극복할 수 있다(Hunt Jr & Daughtry, 2018; Maes & Steppe, 2019).
최근, 작물의 높이는 자를 이용하여 현장에서 실측하는 것을 대신하여 무인 UAV에 디지털 카메라를 장착하여 삼원색인 적색, 초록, 청색인 RGB (red, green, blue) 영상(UAV-RGB)에 Structure from Motion (SfM) 기반의 사진측량 기술을 이용하여 작물 높이를 예측하는 연구가 활발하게 진행되고 있다(Bendig et al., 2014; Holman et al., 2016; Madec et al., 2017; Kim et al., 2018; Furukawa et al., 2020; Kawamura et al., 2020). UAV-RGB 영상으로 높이 지도를 생성하여 이용하게 되면 현장에서 사람이 작물별로 측정하는 방식에 비해 시간과 비용의 문제를 줄일 수 있기 때문에 육종을 위한 표현형 분석에 효과적으로 사용 가능하다(Jang et al., 2020). 하지만, 케나프 작물은 바람의 움직임에 취약한 얇고 긴 형태학적 특성을 가지기 때문에 작물의 흔들림에 의한 인접 영상 간의 특징점 추출 오류로 SfM 기반 작물 높이 예측성능이 낮아질 수 있다(Willkomm et al., 2016; Han et al., 2018; Deliry & Avdan 2021; Xie et al., 2021). 본 연구에서는 노지 포장에서 재배되는 다양한 품종의 케나프 작물의 높이 측정성능을 높이고자 드론의 자동비행을 통해 수집한 케나프 RGB 영상과 함께 알고 있는 일정 높이의 기준 구조물의 영상을 동시에 측정하여 RGB 카메라 기반 작물 높이 예측값을 기하 보정하였으며, 이를 기반으로 재배되는 다양한 품종의 케나프 작물의 높이에 대한 시계열 분석을 통해 품종별 케나프의 생육특성을 구명하고자 하였다.
재료 및 방법
시험포장조성
본 실험은 Table 1에 나타난 바와 같이 24개의 케나프 해외 수집종 및 개발종을 대상으로 하였다. 케나프는 대부분 개화 발생되는 시기에 따라 조생, 중생, 만생형의 가지 생육형태로 분류되는데, 본 실험에서 사용된 품종 중 ‘Kenaf’는 만생종, ‘Everglaeds’ 계열과 ‘Cubano’는 중생종, ‘WIR’ 계열 및 ‘PI’ 계열은 조생종이다(Siepe et al., 1997; Kim et al., 2021). 24개 품종 중 ‘EF-2’는 발아하지 못하여 품종 분석에서 제외하였다.
Table 1.
Twenty-three kenaf (Hibiscus cannabinus L.) cultivars tested.
실험은 2019년 6월부터 8월까지 제주특별자치도 제주시에 위치한 제주대학교 소재 케나프 육종 시험포장(33˚72'N, 126˚33'E, 해발 257 m)에서 수행되었으며 Fig. 1과 같이 24개 품종을 난괴법 3반복으로 총 72개 배치하였다. 파종은 각 시험구별로 25 cm 간격으로 15개 종자를 점파하였다. 물관리는 파종 14일 후부터 수확 전까지 분수호스로 매일 한 번씩 실시되었고 잡초 억제를 위해 검은색 비닐 피복으로 멀칭 처리하였다.
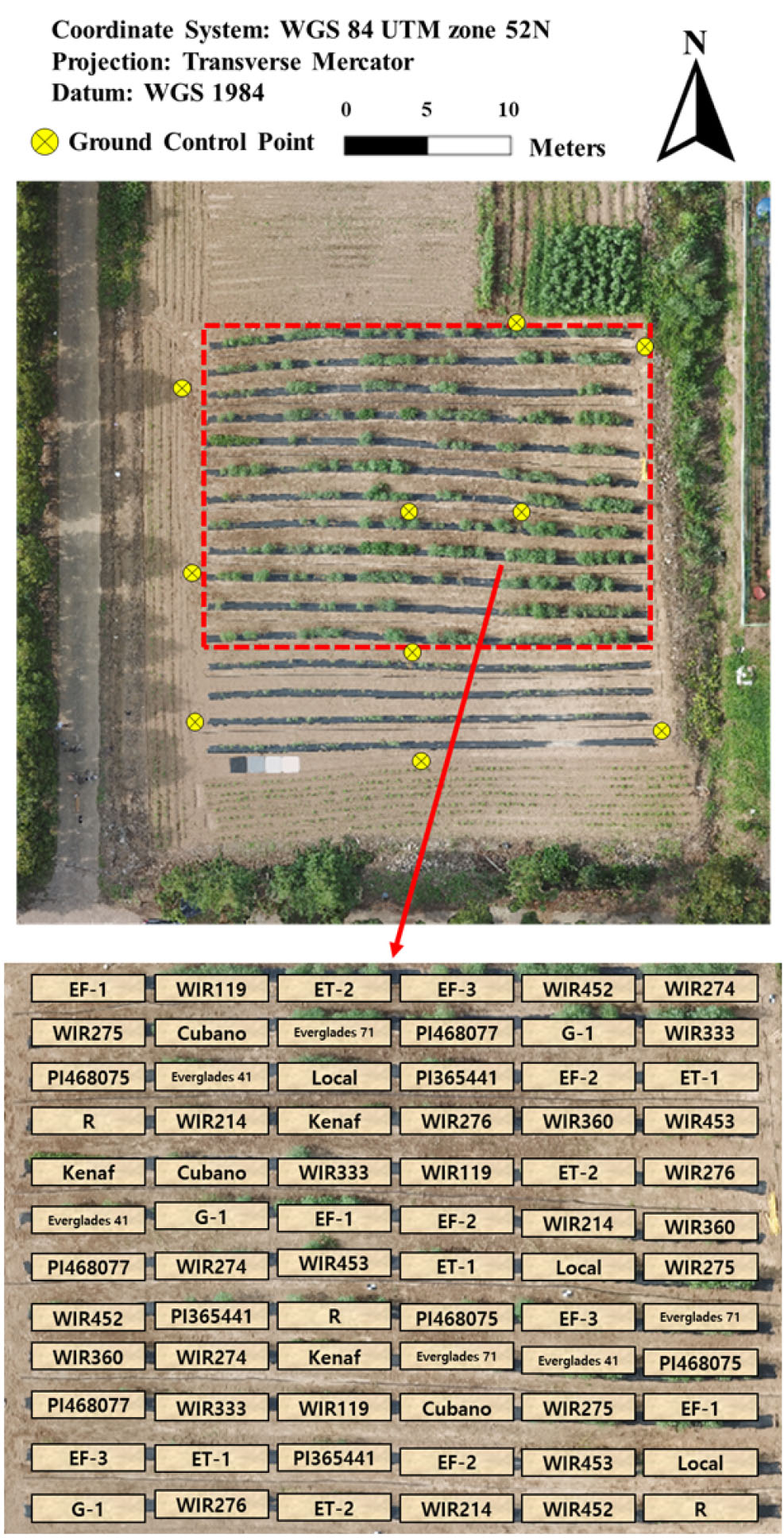
Fig. 1.
The study field of Jeju National University (Jeju-si, Jeju Province) where Kenaf cultivars were cultivated between June and August 2019. Seventy-two plots 4.5 m wide and 1.5 m long were established, and one of cultivars was assigned to each plot. The abbreviation of cultivars is listed in Table 1.
드론 영상 촬영
시험포장의 UAV-RGB는 회전익 무인항공기(MAVIC 2 Pro, SZ DJI Technology, China) 활용하여 인접 영상 간 90%의 겹침이 발생되도록 촬영하였으며, 영양 생장기(출시기, 수잉기, 출수기)인 2019년 6월 22일, 7월 14일, 7월 26일, 8월 6일, 8월 31일에 총 5회 촬영하였다(Table 2). UAV는 가시광선 영역인 녹색(~450 nm), 적색(~600 nm), 청색(~450 nm) 영역의 RGB 카메라(LID-20c, Hasselblad, Sweden)를 탑재하였으며, 해당 RGB 카메라는 1/2.3“CMOS 센서와 초점거리 24 mm-48 mm으로, 12-megapixel (40003000)의 영상을 제공하고, 수평 화각 72.3, 수직 화각 57.5로 40 m 촬영 높이에서 한 픽셀 당 실제 거리 약 1.4 cm인 영상을 얻었다.
수집된 UAV-RGB 영상은 수직과 수평방향 정밀도가 10 cm 이내인 RTK-GPS (real-time kinematic-global position system, Model No. C099-F9P)를 이용하여 시험포장내에 설치된 지상기준점(Ground Control Point, GCP)에 실측 값을 기록하고 이를 이용하여 기하보정을 실시하였다.
Table 2.
Unmanned aerial vehicle flights campaling in 2019.
yGrowth Stage is referenced to (Large, 1954; Webber III et al., 2002)
드론 RGB 영상처리를 통한 높이 예측
취득된 UAV-RGB 영상은 사진측량 소프트웨어(Pix4Dmapper 3.1.7, Pix4D SA, Switzerland)를 통해 정합(orthomosaic) 영상과 3차원 디지털 표면 모델(Digital Surface Model, DSM)이 생성되었다(Fig. 2). 영상 정합은 Pix4Dmapper 소프트웨어 상에서 3단계로 이루어져 진행되었으며 작동 과정의 변수들은 Table 3과 같다. 본 연구에서 이루어진 영상정합의 원리는 첫 번째 단계에서, 획득한 인접한 영상들 간의 공통된 특징점을 추출하여 영상의 위치 및 자세를 수학적으로 예측하고 이를 실제 값과 비교하여 다시 최적화한다. 두 번째 단계에서 최적화된 특징점들의 위치 및 자세에 따라 SfM 알고리즘 기반으로 특징점의 3차원적 위치를 계산하고 그 특징점의 3차원적 위치들을 서로 연결하여 3차원 모델의 기초 형태인 Mesh 형태로 만들어 진다. 마지막 단계에서는 3차원 Mesh를 지리 좌표계를 기준으로 정렬하고 색을 입히는 과정을 거쳐 DSM으로 출력한다.

Table 3.
Image processing parameters of PIX4Dmapper.
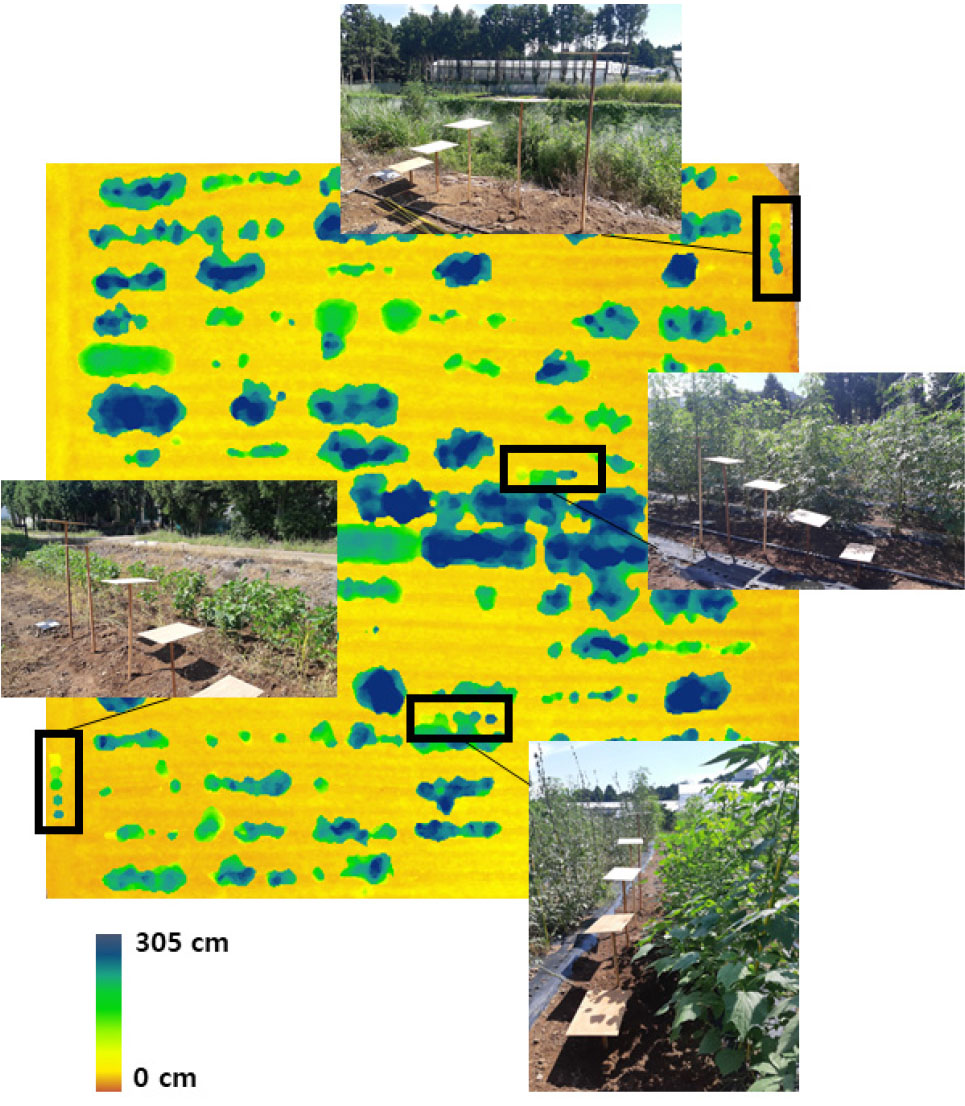
작물이 있을 때 얻어진 DSM은 해당 지역의 고도 정보에 작물 높이까지 반영된 정보로서 DSM을 생성하더라도 곧 바로 작물 높이를 취득할 수 없다. 작물 높이를 얻기 위해선 선행적으로 작물이 없을 때 촬영한 UAV-RGB 영상으로 실험 지역의 고도 정보(Digital Terrain Model, DTM)를 얻어 DSM으로 작물 높이 계산하는데 반영해야 한다(Bendig et al., 2014). 실험 장소에서 작물이 없는 시기인 파종 직후에 드론의 자동 비행으로 RGB 영상을 얻었고 이들을 Pix4Dmapper 소프트웨어를 통해 정합하여 DTM을 생성하였다. 각 생육시기 별 촬영된 UAV-RGB 기반으로 생성된 DSM은 ENVI 소프트웨어(L3 HARRIS Geospatial, USA)를 이용하여 Fig. 3과 같이 DTM과의 차이를 계산하여 작물 높이 지도를 얻었다.

높이 기준점을 이용한 다점 보정 모델식 개발
바람에 의한 작물 흔들림으로 SfM 기반 사진측량 기술의 오류를 개선하기 위해 바람에 흔들리지 않고 고정되어 있는 나무로 만든 구조물을 높이 기준점으로 설정하였다. Fig. 4와 같이 30 cm, 60 cm, 90 cm, 120 cm, 150 cm와 같이 다른 높이 기준을 가진 다섯개의 나무판 구조물을 시험장 내 네 곳에 설치하였으며, 설치된 구조물의 실제 높이는 토양에서부터 구조물 최고 높이 지점까지 자로 측정하여 얻었다. UAV-RGB 영상처리를 통해 얻어진 높이 지도에서 구조물 위치에 해당하는 픽셀에 구조물의 사각형 형태와 크기가 비슷한 Region of Interest (RoI)를 설정하여 RoI의 픽셀 값 중 최댓값을 예측 높이로 추출하였다. 높이 기준점의 실제 높이와 예측된 높이는 다점 보정 모델식 개발을 위해 단순선형회귀가 적용되었다. 얻어진 선형식은 보정을 위해 UAV-RGB 영상으로 예측한 케나프 높이 값에 반영하여 예측 높이 값을 보정하였다.
높이 예측의 검증
Bendig et al. (2014)는 UAV-RGB 영상을 통해 예측한 높이와 실제 높이를 비교할 때, 생성된 높이 지도의 픽셀 단위의 높이 값을 비교하는 것이 신뢰성 높은 검증 방법이라고 제안하였으며, 이에 따라 본 연구에서는 케나프 높이 예측 검증을 위해 케나프 높이 지도에서 각 시험구 위치에 RoI를 설정하여 최대 픽셀 값을 추출하고 시험구 별 대푯값으로 결정하였다. 이를 실제 자를 이용하여 측정한 시험구 별 최대 높이와 비교하여 픽셀 단위의 검증 방법을 시행하였다.
예측된 케나프의 높이는 실제 높이와 선회회귀분석을 이용하여 평균제곱근오차(Root Mean Square Error, RMSE)와 결정계수(), 기울기(slope), 절편(offset) 등을 분석하였다.
RGB 영상기반 높이 지도를 이용한 케나프 생육특성 분석
케나프 작물의 개별적 높이 측정은 Fig. 5와 같이 인접 작물 간의 겹침이 발생되지 않은 생육 초기(6월 22일)에서 작물별로 직경 40 cm인 원으로 RoI를 설정하여 각 RoI에서의 높이 지도의 픽셀 중 최댓값을 추출하였다. 추출된 높이들은 각 촬영 시기의 품종 별로 정규화 하였고 하위 5%에 해당하는 낮은 데이터들은 이상치(outlier)로 판단하여 제거하였다(Jamil et al., 2022; Kawamura et al., 2020). 생육시기에 따른 품종 별 높이는 품종 별로 구별하여 그 평균값을 중심으로 비교하였다. 또한, 높이를 통해 품종 간의 유의미한 차이를 통계적으로 확인함으로 본 연구에서 제안하는 방법에 따른 예측 높이가 육종 선별에 활용 가능한 표현형 인자로 제시될 수 있는지 확인하고자 하였다(ANISA et al., 2022; Han et al., 2021; Kim et al., 2021). 몇몇의 품종 집단에서 개체 수가 30개 이하로 관찰되는 경우를 고려하여 비모수 통계 기법인 Kruskal-Wallis 검정 및 사후 Bonferroni-Dunn 검정 시행했으며, p값이 0.01 보다 작은 경우에서 집단 간의 유의한 차이가 발생하는지 분석하였다. 해당 통계처리는 R 소프트웨어(R. 4.1.2, RStudio Team, R Foundation for Statistical Computing, USA)를 이용하여 수행되었다.
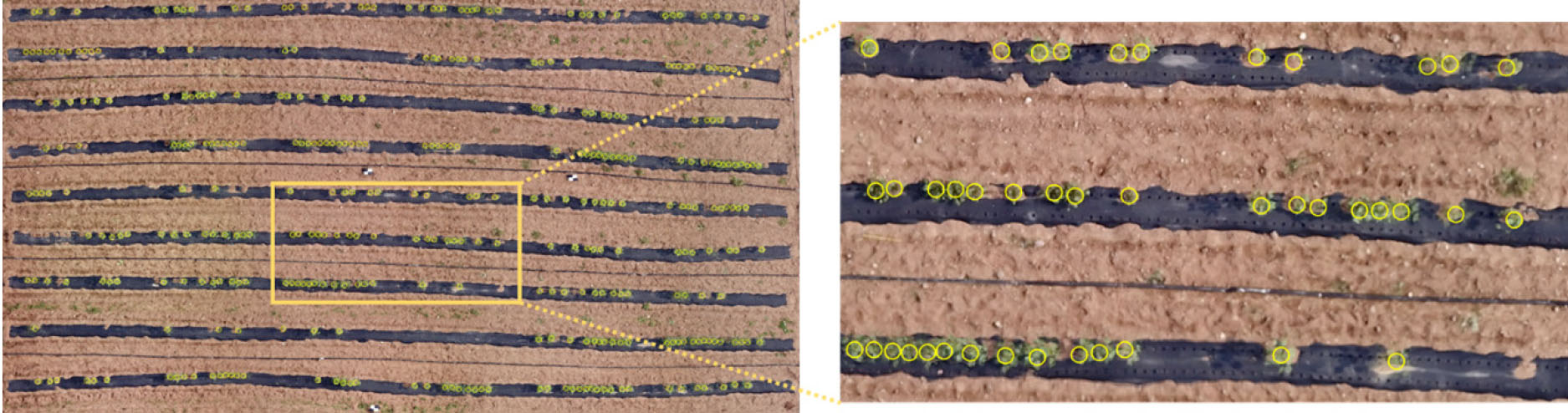
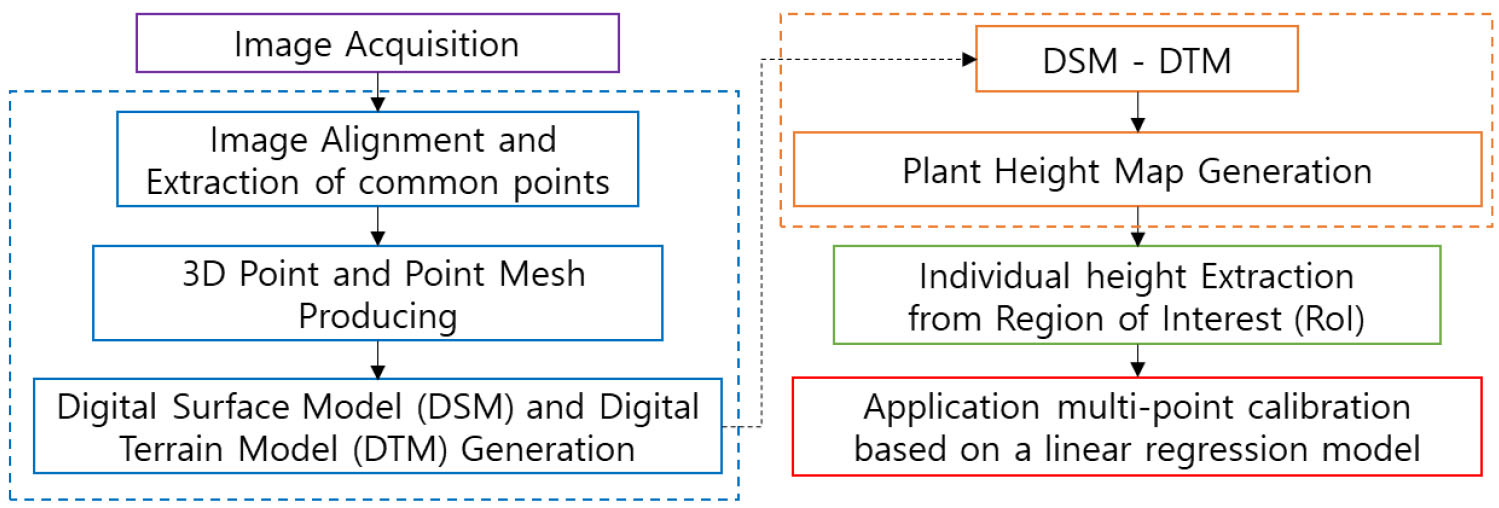
Fig. 6은 본 연구에서 수행한 케나프의 높이 예측의 전체 과정을 보여주는 것으로 UAV-RGB 영상 촬영, DSM 및 DTM 생성, 높이 지도 생성, 개별 높이 추출, 보정식 적용 등의 단계를 보여주고 있다.
결과 및 고찰
다점 보정 모델
예측 성능을 향상시키기 위해 시험장에 배치된 높이 기준점을 통해 20개 지점에 대한 실측값과 정합에 의해 예측한 값의 데이터를 얻을 수 있었으며 이를 이용하여 개발한 다점 보정 모델식은 Fig. 7과 같이 y = 1.07X - 1.56로 얻어졌다. 여기에서 X는 사진측량 기술에 의해 예측된 높이이고 y는 실제 높이이다. 보정 모델식의 은 0.95로 보정으로 이용하기에 적절하다고 판단하였다.

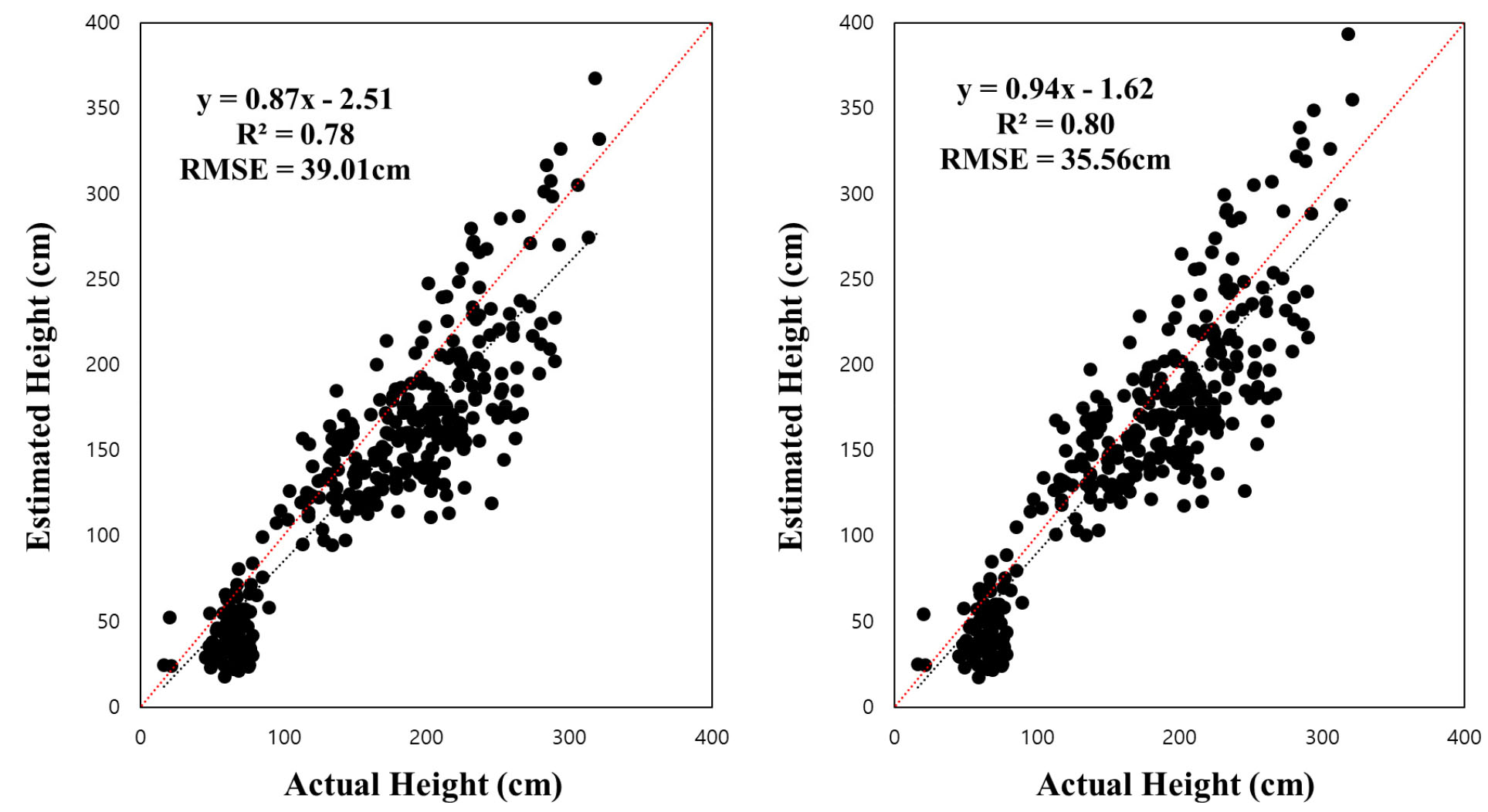
UAV-RGB 영상에 사진측량 기술을 적용하여 예측한 케나프의 높이와 실제 높이를 비교하였을 때 은 0.80로 나타났으며, 적용 보정 모델이 선형회귀식임으로 는 보정 전후로 변화가 없었다(Fig. 8). 작물 높이 분석에서 의 성능 평가는 ‘높음’( > 0.7) ‘중간’(0.5 < < 0.7), ‘낮음’( > 0.5)로 평가될 수 있으며 본 실험에서 도출된 성능은 ‘높음’에 속해 우수한 예측을 보였다(Bendig et al., 2014). 이는 벼(Kawamura et al., 2020), 보리(Bendig et al., 2014), 옥수수(Niu et al., 2019), 밀(Volpato et al., 2021) 등 다양한 작물들의 높이 예측을 수행한 선행 연구들과 같이 높은 상관성을 보였다.
다른 통계량에 대하여 예측 높이와 실제 높이 간의 비교한 결과, 보정 모델식을 적용하였을 때 RMSE가 39.01 cm에서 35.56 cm로 감소하였으며, 기울기는 0.87에서 0.94로 7%의 개선을 보였고, offset은 -2.52에서 -1.62로서 절대값이 감소하였다(Fig. 8). Han et al. (2018)은 UAV-RGB 영상 기반 높이 예측에서 시험장에 배치한 61 – 183 cm의 범위의 높이 기준점 두 개를 가지는 구조물 다섯 개로 높이를 보정하여 약 3 cm의 RMSE 감소시켜 본 실험과 유사한 효과를 보였다. Hu et al. (2018)는 구조물이 아닌 작물의 높이를 직접 측정함으로 높이 개선 효과를 보였는데 본 연구에서 제시하는 고정불변한 구조물을 이용하여 예측한 방법은 다양한 생육시기 별 표현형 취득에서 추가적인 작물 높이 측정을 요구하지 않기 때문에 효율적인 보정 방법으로 제시될 수 있다.
실제 높이와의 비교 분석을 통해 본 연구에서 제시한 다점 보정식이 적용된 높이 예측 방법은 높은 선형성( = 0.80)과 유사성(기울기 = 0.94, intercept = -1.62)으로 작물 높이를 신뢰성 있는 표현형 인자로 얻을 수 있어 해당 방법이 육종에 적용 가능한 표현형 분석법으로 사용될 수 있다고 판단하였다.
케나프 높이 지도의 육종 적용
케나프의 섬유로서 활용하기 위해선 작물 높이가 최대로 나타나는 품종 선별이 요구된다. 따라서, 효율적인 육종 전략 수립을 위해선 품종 간의 성장 곡선을 비교하여 빠른 시기에 품종 간의 높이 차이 결정이 가능하게 하는 것이 요구된다(Kang, 1997; Echekwu & Showemimo, 2004; Webber III et al., 2002). 전체적인 품종에 대한 생육시기에 따른 케나프 높이 변화는 Fig. 9과 같으며 본 연구에서 개화기(flowering)까지 촬영을 수행했기 때문에 꽃이 지고 종자가 맺히는 생식 성장기까지 담아내지 못하여 작물 높이의 포화가 시작되는 시점을 포착하지 못하였다. 파종 50일 이후(Days After Sowing, 50 DAS)인 생육 초기에서 1 m까지 빠른 성장을 보였지만 중반기에 들어서서 성장 곡선이 완만했다가 후기에서 빠른 성장세를 보였다. 또한, 생육후기(121 DAS)에서 표준편차가 51.6 cm로 최대가 되어 생육후기에서 품종 간의 높이 성장률이 차이가 있음을 확인하였다.
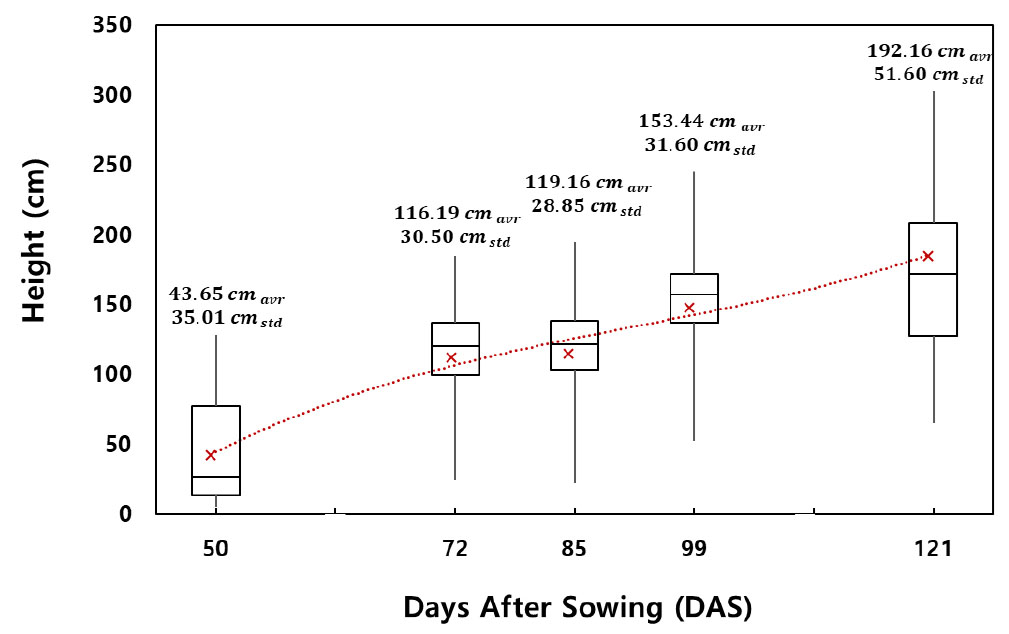
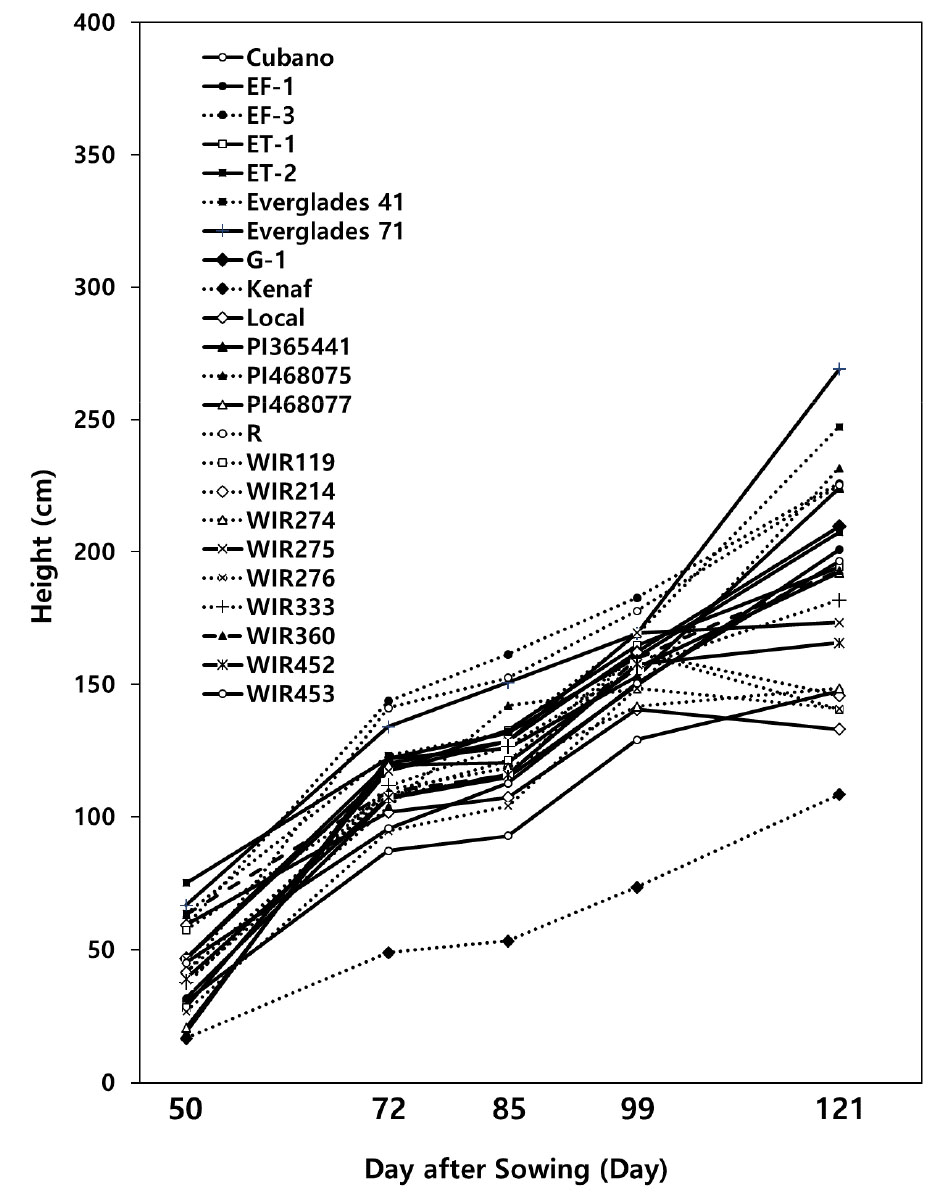
Fig. 10와 Table 4에서와 같이 품종 별로 구체적인 높이 변화를 분석하면, 생육중기에서 생육후기로 성장하는 과정에서 ‘Everglades’ 계열의 높은 성장률과 ‘WIR’ 계열의 낮은 성장률로 품종 별로 성장에 차이를 보이는 경우가 나타났다. 생육후기에 극단적으로 높이 순위가 올라가거나 내려가게 된 품종이 관찰되었다. 이상과 같은 결과에 따라 케나프는 생육후기로 갈수록 품종 별로 성장 양상이 다르게 나타나기 때문에 섬유 생산을 목적으로 작물 높이를 주요 표현형으로 하는 육종 전략 수립을 위해선 조기의 품종 선별보다는 생육 후기에 높이 변화를 분석하여 육종 선발에 활용하는 것이 나을 것으로 판단되었다.
가축 사료로 케나프를 활용하기 위해선 파종 약 70일 이후부터 케나프의 조단백질 함량이 감소하는 것을 고려하여 생육 중기의 작물 높이 분석을 통한 품종 선별이 요구된다(Webber III, 1993a; Webber III et al., 2002). 선행 연구와 같이 본 연구에서는 생육중기인 72 DAS, 85 DAS에서 Kruskal-Wallis 검정 및 사후 Bonferroni-Dunn 검정을 시행하였으며, 그 결과 Table 4에서 같이 각각 10개와 11개의 집단으로 유의미한 차이를 보였다. 이는 UAV-RGB 영상 기반 높이 예측 방법은 생육중기에서 품종 간의 유의미한 차이를 확인할 수 있기 때문에 가축 사료 목적을 위한 육종 선발에 활용될 수 있을 것으로 판단하였다.
Table 4.
Variation in plant height among kenaf (Hibiscus cannabinus L.) cultivars in plant height during this study.
적 요
국내 환경에 적합한 케나프 육종을 위해선 비용, 정확도, 속도가 최적으로 설계된 정량적인 고속탐색법(high-throughput)에 기반한 표현형 분석법이 필요하다. 최근 UAV 기반의 원격탐사 기법의 발달로 노지에서 재배되는 작물의 생육 인자들에 대한 대량 데이터를 저비용으로 신속하게 얻을 수 있으며 정확하게 분석하기 위한 연구가 활발하게 진행되고 있다. 본 연구에서는 국내에서 요구되는 케나프의 섬유와 가축 사료로서 육종을 위해 해당 목적과 부합한 케나프 높이를 주요 표현형 인자로 선정하여 UAV-RGB에 SfM 알고리즘 기반의 사진 측량 기술을 적용함으로 높이를 예측하고자 하였다. 기존 방법으로 예측한 작물 높이는 바람에 의한 작물의 흔들림으로 오차가 발생할 수 있으며 키가 2 m 이상 크게 자라 실측도 어려운 문제가 있다. 이러한 문제점을 해결하고자 바람에 흔들리지 않는 일정 높이를 가지는 고정 구조물을 설치하여 기준점을 이용한 모델식으로 기하 보정을 통해 높이 예측성능을 개선하였다. 그 결과 는 0.80으로 나타났으며, 보정 전( = 0.80, slope = 0.87, offset = -2.51) 보다 높은 신뢰성( = 0.80, slope = 0.94, offset = -1.62)을 확보하였다. 품종별로 생육단계에 따라 측정한 높이 지도를 통해 얻어진 케나프 키 정보는 품종 별로 유의미한 차이를 보임으로서 해당 방법으로 예측한 케나프 높이가 섬유와 가축 사료 목적의 육종 선발에 활용될 수 있을 것으로 판단하였다.
